

Travel 2018-2019
Mr. Benmar: In Memoriam
For years, we turned the helm over to our trusted crew member, Midshipman, Mr. Benmar.

While he was rugged, reliable, and patient, it was always a kind of crap-shoot to see what Mr. Benmar had in mind. Roll the dice. Perhaps you were on course, perhaps not.
The white arc on the panel is actually a faded old window through which you can make out a dial marked out like a compass.
The ‘course’ knob turned the compass dial.
A controller circuit compared the onboard compass with the setting on the dial and activated the hydraulic steering pump to change course. AFAIK, it was a super-simple circuit to flip the pump between port and starboard depending on the error between desired course and actual compass heading.
Eventually, the ‘sea state’ filtering would damp out any oscillation, and we’d be sailing more-or-less straight.
There were issues, of course.
(1) The dial had become hard to read.
(2) The setting was inaccurate. There’s a way to adjust it, but the backlash in the gears made it difficult to be precise.
(3) It was spoofed if you weren’t careful with placing metal things in the same cabinet as the compass.
(4) It didn’t integrate with anything.
Since we always had a separate chart plotter, we would tweak Mr. Benmar’s course setting until we were pointed in the right direction. It became part of watch keeping: check the chart plotter, turn the course knob. If the course steered didn’t get better, turn the knob the other way. Because of gear backlash, sometimes you had to turn too far and then turn back. I’d estimate we did well over 1,000 sea miles manually adjusting Mr. Benmar’s notion of where we should be going.
(The total miles involves a lot of single night legs and a bunch of windless days. The longest legs with Mr. Benmar at the helm was Miami, FL, to Beaufort, NC, by way of Fernandina Beach to refuel.)
Last year, we upgraded to a B&G NAC-2 autopilot, AP-44 controller, and Zeus2 chart plotter. The installers cut the wires from Mr. Benmar to the pump, preserving the old, powerful, reliable Hynautics pump. This took the quirky Midshipman out of the control loop. The Cetec/Benmar compass vanished in a haze of installation debris.
The controller remained, however, firmly bolted into the cockpit and sticking into the aft cabin. Until today. Today, we commit Mr. Benmar’s remains to the scrap locker of the sea, where we all wind up when our watch has ended, Poseidon willing.
Several years ago, leaving Annapolis, bound for Solomon’s Island, the weather was flat calm, the engine was thundering, and we tried to turn the helm over to Mr. Benmar for the next seven or so hours.
Red Ranger made huge circles in the Bay. We check the course setting. Seemed close to right.
We tried again. Rather than find a course, we circled. The helm was hard over as we turned through the compass. We watched while Red Ranger boxed the compass more than once.
Embarrassingly, a boat we knew hailed us on the VHF radio to ask what we were doing.
“Fighting with Mr. Benmar,” was our cryptic answer.
We reset the circuit breakers. Dialed in alternative courses. Scratched our heads.
Then CA asked “What changed?”
Good question.
What had we changed? When we worked our way up the Bay from Deltaville to Solomon’s to Annapolis, everything had worked perfectly. What had changed?
As we pondered, she darted below.
She returned, and suggested I try again.
This time? Perfection. Mr. Benmar picked a course, and we were on our way to Solomon’s island.
What had CA done?
It turns out I had been playing with our Wifi antenna in Galesville, and had left a coil of cat-5 ethernet cable on the aft bunk. While tidying up for guests, she had tossed it into the compass cabinet, thinking to clear it out later. And it sat there, forgotten. When we hand-steered to Annapolis, the coil of wire hadn’t made its presence felt.
Once she removed the coil of wire, Mr. Benmar’s compass was happy. And we were happy Mr. Benmar could handle the boring job of steering for seven or so hours of motoring through flat-calm Chesapeake Bay conditions.
The controller is going to wind up on eBay for a week to see if anyone wants it for parts. Then — I think — it’s going to the trash. Maybe I’ll try the used equipment shelf at Bacon Sails, but, realistically, who wants this last, lonely part?
We don’t really have a good name for the new autopilot. Because the display is a Zeus2, I’m tempted to call it “The Greek.” The controller is a Simrad AP-44, so a name like “Simpson” might fit nicely. Or maybe they’re a team. Don’t know yet.
But Mr. Benmar’s quirkiness will be missed.
Update. The old control unit sold via eBay. He’s truly gone.

Crab Heaven
The West River Sailing Club membership has a number of benefits. Crabs being one of them. Of course, we had to get there, and get back in time for work on Monday. And square away the Auto-Pilot.

After stuffing our faces with crab, slaw, corn, more crab, and cake, we spent Saturday night at the West River Sailing Club dock. Did I mention the crab? There was a buffet with chicken, pork, hot dogs, and a green salad with roasted eggplant.
Saturday started with approximately no wind. This can make sailing difficult.
We could — however — watch it build.
Seriously.
We’re in flat water. A few hundred yards away, we can see the darker color of choppy little wavelets. The line of darker, wind-stirred water worked it’s way north until we felt the first little puffs and started moving. It was pretty cool.
But required a lot of patience.
The wind built steadily. We started with almost everything we owned. The only thing I held back was the mizzen stays’l. I had two reasons: one it was building, and we’d have to wrestle it down, and if it didn’t shift, we’d have to gybe.
The wind build and shifted slowly, so we never had to gybe. Instead, we dropped the mizzen when it was starting to twist us to weather too much.
I experimented so more with my “shabby traveler” arrangement. I’ve tried sheeting the main boom to the toe rail with the boom vang when we’re running downwind. It works really well because it means we don’t have the main sheet dragging across the bimini. (Pictures will follow. Eventually.)
My shabby traveler doesn’t gybe well, however.
I tried one technique that was almost a complete disaster. We won’t talk about that any more than is minimally necessary.
It looks like the following should be done.
1. Haul in the main until it’s over the leeward rail.
2. Reattach the fixed mainsheet to the boom. This will pinch the boat up something fierce.
3. Disconnect the traveling main sheet from the boom.
4. Gybe across carefully to the other rail position. This will pinch up to a run or even a reach.
5. Move the traveling sheet to the new leeward rail and the boom.
6. Release the fixed mainsheet and ease the boom out until she finds per proper downwind course. (Usually 150° off the wind.)
WRSC Improvements
It’s fun to visit, help cleanup, and then roll down the dock to the boat. No driving. Just pure relaxation.

The dock has the new power configuration fully installed. This includes proper GFI outlets all along the waterfront with large 30 Amp hookups for large boats like ours. We don’t actually use the 30A power, though, because we have solar panels. But it’s there, now, and it’s elegantly done.
It’s wonderful to talk boats with people.
Sunday’s return?
Meh. Fitful wind 3 to 5 knots. On the nose. We tried to sail, but it was difficult to find a working balance between main and yankee in the super light air. This was exacerbated by a problem I created trying to reset the autopilot configuration.
When I updated the auto-pilot software, I glanced at dialog box at the end of the procedure that said calibration is required. (Note to future self: take a picture of the display.)
I tried to restore the autopilot settings from the Zeus2 chart plotter. But. Afterwords, the steering setup was wrong (32° to port, 45° to starboard? That’s a nope.) So I tried to reset the wheel myself. That’s super hard to do.
You need an assistant below telling you when the rudder is amidships. It’s hard to swing the wheel through it’s five turns to find the 2½ turn center position. Exactly. A little error is a big deal.
After we got back and CA pulled up the aft bunk to check, I found we were off 9°. This would make it difficult to center the rudder in light air and get Red Ranger beating to weather. What seemed like centered helm kept pushing us to port.
Now we need to get out again, and rerun the steering sensitivity calibration with a properly centered wheel and see if we can beat to weather properly.
Yay! More Sailing.

Yoga Teachers and Software Upgrades
We took CA’s Yoga Teachers cohort sailing on Saturday. Winds 10-ish (and dropping) from about 090°. Sunny and 25°C air temp, so it was — perhaps — one of the most perfect possible days for sailing. Can I say perfect without invoking Poseidon’s wrath? It was essentially perfect.
There was two problems and they were tiny. Interestingly, the two problems were not the things we were even worried about. Shows you how useless worry is.

We took the crew through a bunch of common maneuvers. Depart the dock. Drop the anchor. Eat lunch. Swim in the bay. Raise the anchor. Sail around. We tacked once. We adjusted the trim of the sails. All kinds of ordinary sailorly stuff. (No gybing, though, so we missed one of the big kinds of maneuvers.) We chatted. We took pictures of the bay and boats.
The return to the dock was less than stellar, but we didn’t break anything, so it wasn’t really a problem. Not like the two tiny problems that we found, later.
We saw a schooner, and a yawl. Red Ranger is a ketch, so we got to point out the deep variety of boats on the Chesapeake Bay. Fun for boat nerds like me. Maybe not so much for them.
CA likes to do the 5-F’s of safety briefing for first-timers:
- Falling Overboard. Hold the wire ropes and wooden handles. One hand for yourself, one hand for the boat. Keep your hips below the lifelines and your head below the boom when the boat’s in motion — squat as you walk.
- Flooding. There are big through-hulls with handles and foam plugs. There are two electric pumps and two manual pumps.
- Fire. There are extinguishers all over the place. Note the ladders used for exit.
- First-Aid. Kit hanging under the ladder. Also. “Ladder”: don’t treat the ladders as stairs. Descend ass-first.
- Famine. Be sure you have enough water at all times. There are snackies in jars in the galley.
- Fatigue. Don’t over-exert yourself. Stay hydrated. Rest when you’re tired, bad judgement and problems come from fatigue.
Okay. It’s six. But Famine and Fatigue are almost the same thing.
The Worry Factor
We had a lot of concerns in the backs of our minds as we welcomed guests. And the two tiny thing that went wrong weren't even one of the concerns. Which is how these things surface, isn’t it? The real problems aren’t something on your worry list.

We worried about Mr. Lehman starting. Back in November, “Winterizing and The Pink Stuff”, we had trouble getting the engine started. Then it was COLD and the batteries (and fuel) were not having any part of it. Today it was perfect and Mr. Lehman fired on the first crank. Bam! Running!
We worried about the fuel system. In May, “The Drain Hose”, we found fuel everywhere in the bilge. It wasn't clear if the leak is related to the good (port) tank or the decommissioned center tank. It wasn't clear if the fuel was leaking from the engine itself.
From yesterday’s operation, it’s clear that the diesel really was from rain water filling the center tank. Everything else went flawlessly. The slow drip from the fuel pump is something I have to address, but it’s S… L… O… W… It can’t produce a quart of diesel in an hour of operation.
We worried about the newly-greased through hulls, and the new batteries. There are a lot of potential problems things that could be less than perfect.
But they weren’t less than perfect. They were all perfect. (Pardon us, Poseidon, for sounding like we’re filled with hubris.)
Software Upgrades
Early Saturday morning — before guests arrived — I fired up the B&G Zeus2 chart plotter, connected it to the marina wi-fi and downloaded software upgrades. This was fun. The Zeus checks ALL of the system components for upgrades. It does the downloads and installs where it can.
Let me repeat the amazing thing:
The B&G Zeus2 identifies all of the components — with version numbers — and handled the software upgrades for me.
This was amazeballs. The. List. Of. Components. No chasing down notes on the components (which I keep separately.) No following wires around. No checklist in my maintenance log book.
I had to remind myself this is a sailorly job, it turns out. It doesn’t feel like it, though. This thought bugged me the whole time I was doing it. “Aren’t I supposed to be taking apart something dirty or greasy or tangled up with corroded parts? Aren’t I supposed to be lifting heavy, awkward pieces of equipment like sails or booms or something?”
Nope. Software upgrades. Just like my day job. Except on the boat.
There are two things the Zeus2 was reluctant to do:
- Upgrade the charts. These are a HUGE download that takes hours. It seems easier to buy the complete package from https://gofreemarine.com. I suspect the B&G may be able to handle the download after I pay for the charts on that site. Also, https://www.fugawi.com/charts is a good source for charts.
- Upgrade the Simrad autopilot. It balked at the AP-44 upgrade. This turns out to be one of the tiny problems.
I’ve bought a fresh set of chips with marine charts for US East Coast, Bahamas, and Caribbean for the old Standard Horizon backup chart plotter. This was through Jeppesen Light Marine. It seems like they’re struggling in the competitive (i.e., Garmin-dominated) industry.
I’ve also ordered (but haven’t received) another copy of the charts for the B&G. They use different kinds of chips, so, I buy the charts twice. And I bought these from Fugawi. I think I may try GoFree Marine next year.
I also download charts for phone and iPad, but those are backups to the backup chart plotter, so I don’t obsess about them so much. However, they are easy to refresh, and — in some cases — are more current than the “official” expensive copies.
The NAC-3 autopilot upgrade is moderately complicated. When it shuts down, the other units all panic because they stop getting GPS waypoints. The first few times, I didn’t know what the problem was and reset the autopilot, interrupting the upgrade. Then I figured out what was going on, silenced the B&G displays, and the upgrade finished nicely.
One Tiny Problem
The one tiny problem with the upgrade surfaced via the VHF radio later on Saturday.
The Standard Horizon radio really wants to know where it is in the world. It needs to be integrated with an NMEA-0183 data bus that will provide it position and time information. Having the information means we can push the MOB (Man Over Board) button and have the radio broadcast an accurate distress signal with the exact location of the problem.
However.
With guests on board, we noticed the radio wasn’t getting a position report. Periodically, it would beep an alarm to announce it’s displeasure. We silenced it, but. Hmm. Why is the radio not getting its positions?
In the olden days, I had a wiring block that provided the data from chart plotter to radio.
This has been replaced by the NMEA-0183 gateway in the Zeus2. So. Of course, I blamed the wiring. After the guests left, I poked around at the wonderful installation job MTS did, and realized it wasn’t wiring.
Also. CA asked the standard question: “What did you change?”
Ah. Software.
I poked around on the Zeus2. There’s a dialog box under System > Network > NMEA0183 that has a check-box for Serial Output. This would be the serial output that the radio needs. Check that. Radio Happy.
It appears the default configuration changed with the software upgrade. And now it’s fixed. And the radio knows our location.
A cool feature of the radio is it displays the coordinates on the microphone. On. The. Microphone. I’ve heard too many distress calls (some mayday, some pan-pan) where there’s this awkward complexity in reporting the GPS location because the radio and the chart-plotter aren’t near each other. Or they’re working from paper charts (like we used to in the old days) and don’t have any idea where they are. Our location is displayed On. The. Microphone.
The Other Tiny Problem
The Simrad AP-44 Autopilot Control wouldn’t update automatically from the Zeus2. My pet theory is that the software has a little “brand affinity” check. The B&G Zeus2 isn’t happy with the Simrad AP-44. This is likely nonsense, since they’re both made by Navico.
The Zeus2 was able to gather the AP-44’s running version and check on-line for the available version. That part worked seamlessly. It simply couldn’t stage the upgrade.
On Sunday, I tackled the final upgrade. The software change to the AP-44 means downloading a .upd file to a USB device, putting the device into the maintenance port, and then restarting it.
Sounds simple enough. Hah.
Step 1. Download. Using Safari to download is a problem. Safari won’t preserve the original file name. It adds a goofy ‘.dms’ suffix to the filaneme.
Okay. Switch to Chrome to download the .upd file.
Step 2. Find a USB stick to upgrade the AP-44. Got that.
Missing Step. Take the furniture apart to expose the maintenance port. It’s not complex, but the displays are behind some galley woodwork. So there’s that.
Step 3. Power the instruments on with the USB stick.
Fail.
Coffee.
Google.
It appears that the following is important: “the USB stick be formatted first to Windows FAT 32”. (This was HARD to find. Navico, B&G, and Simrad need to make this super-explicit.)
This, it turns out, isn’t easy on Mac OS X.
The Disk Utility will format FAT and exFAT. After the FAT format is complete, the utility reports the device as being FAT16. (Not FAT32.)
Tried FAT, and exFAT. Neither worked.
Fail Repeatedly. Coffee. Google.
Found the following bit of magic. This will format a thumb drive as FAT32 on a Macintosh. It must be done from the command line.
diskutil partitionDisk /dev/disk2 MBRFormat "MS-DOS FAT32" "UPGRADES" 100%
Seriously. From the command line, not the Mac OS X Disk Utility. Once the .upd file is placed on this newly-formatted “Windows FAT-32” volume, the AP-44 upgrade happened like it's supposed to.
Now I have an “UPGRADES” USB stick that needs to be kept with boat hardware, including old chart chips and the like. It’s like that special block-and-tackle used only for lifting the dinghy motor and nothing else. Or that special wrench used only for the bleed screws on the diesel injector pump. Or that special wrench used only to take the engine zinc out of the heat exchanger.
This is such an odd thing to be tinkering with USB stick formatting. Shouldn’t I be bending on sails or tying fancy knots or something? What about changing engine oil? Or cleaning the sand out of the bilge? or cleaning the dirt out of the engine pan?
Nope. Software runs the chart-plotter and autopilot. It’s as important as the hydraulic fluid.

Welcome to the New Sailing Year
Previous years began around Memorial Day. This year, we had a late start.
CA’s Side Project has been Yoga Teacher Training. 200 hours of classroom time is a lot of work.
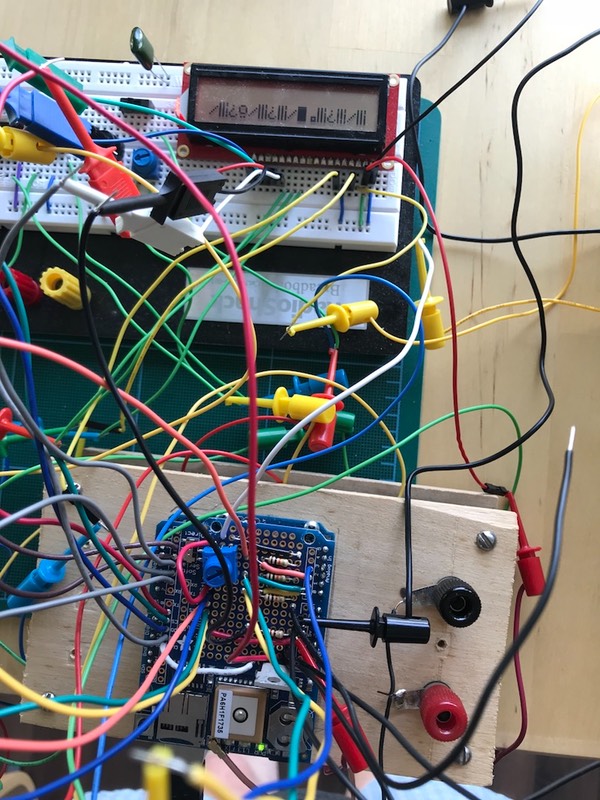
S.Lott's Side Project has been an Anchor Alarm.
The core concept is this.
1. Arduino CPU.
2. GPS.
3. A Liquid Crystal Display (LCD) to show what’s going on.
4. A push button to mark Red Ranger’s position.
5. A knob to set the scope (really the radius of a guard zone.)
6. A switch to arm the horn.
7. A horn that will wake the dead when we drift off the marked position. This requires a MOSFET transistor that will allow a 12V horn to coexist with the 3V Arduino.
This will be LOUDER than the little beeper in the chart plotter. And it won’t require leaving a phone on all night to check our position.
For the last few months, it’s been an evolving pile of wires and stuff as it moves closer to something I can install on Red Ranger for sea trials.
Today, I finally figured out why the LCD display wasn’t working even though almost everything else was humming along well.
[Updated with new details.]
The v1 prototype used a cool little “breakout” board: https://www.adafruit.com/product/746. The GPS and not much more. There’s room on the back for a battery (to make it acquire satellites more quickly.)
The v2 prototype is using a more sophisticated “shield”: https://www.adafruit.com/product/1272. This includes a data logger with an external storage device. Pretty slick.
In order to have color-coded LED backlighting for the LCD display, I needed all of the digital output pins available on an Arduino Uno. All. Worked good with the (simple) breakout board.
The data logger shield uses Arduino digital pin 10 for chip select, 11 for MOSI, 12 for MISO and 13 for SCK. Ugh. The logger can conflict with four of the pins I wanted to use.
Original Plan
The breadboard version #1 worked pretty nicely. I took it out on the boat to play around and gather some data. It had the following digital connections.
Pins 0 and 1 are the built-in serial interface to the board as a whole. Don’t touch or you can’t easily debug.
Pins 2 and 3 are part of the data path to the LCD. As are Pins 4-6 and 12. (Yes. 7 pins required for the LCD.)
Pins 7 and 8 are part of the serial interface to the GPS. Stuck with these.
Pins 9-11 provided a slick LED backlight to provide Red/Green/Blue illumination for the LCD to show the status of the alarm system. Red for armed. Green for ready. That kind of thing.
Pin 13 is the trigger for the alarm horn. (And yes, reset will beep the horn.)
The buttons and switches are read with Arduino analog inputs.
Revised Plan
In order to build version #2 with the parts I have on hand, I’m may need to change the user experience to stop using the LED backlighting as a status indicator.
Pin 9 will be used for the LCD data (instead of pin 12.)
The LED backlighting will be an optional feature. (And the wires in digital pins 10-12 can be removed from the board, if necessary.)
I can replace it with a simple switch for the LED backlight on the LCD: red for night-time, off for day. It’s simple: a switch and current-limiting resistor to the red LED.
Next Gen Options
For version #3, I have two choices.
- Upgrade to an Arduino Duo or something with more pins. Not sure I like this. The Uno has the right number of pins and almost enough memory to handle what I’m doing.
- Build a smarter shield. Get an AdaFruit ProtoShield — maybe a https://www.adafruit.com/product/2077 and plug the breakout board onto the “bare” shield. This will get me back to the version #1 user experience with the backing LED’s to show status.
The Secret Agenda
My secret agenda is to use a more sophisticated anchor watch algorithm. I want to use bearing to the original mark and course over ground to detect drift directly rather than rely on a simple guard ring to see if we’ve drifted too far off our marked position.
During a change in wind or tidal flow, the boat will appear to drift, but then will stop — ideally inside the guard ring.
When COG is 180° from the bearing to the marked position, we’re moving away from the anchor. If this slows and stops, the anchor caught us. Good. If this doesn’t stop, we’re moving and alarms need to be sounded.
